Капитан М. Виноградов,
кандидат технических наук
Современные радиолокационные средства, устанавливаемые на самолетах и космических аппаратах, в настоящее время представляют один из наиболее интенсивно развивающихся сегментов радиоэлектронной техники. Идентичность физических принципов, лежащих в основе построения этих средств, делает возможным рассмотрение их в рамках одной статьи. Основные различия между космическими и авиационными РЛС заключаются в принципах обработки радиолокационного сигнала, связанными с различным размером апертуры, особенностями распространения радиолокационных сигналов в различных слоях атмосферы, необходимостью учета кривизны земной поверхности и т. д. Несмотря на подобного рода различия, разработчики РЛС с синтезированием апертуры (РСА) прилагают все усилия для того, чтобы добиться максимальной схожести возможностей данных средств разведки.
В настоящее время бортовые РЛС с синтезированием апертуры позволяют решать задачи видовой разведки (вести съемку земной поверхности в различных режимах), селекции мобильных и стационарных целей, анализа изменений наземной обстановки, осуществлять съемку объектов, скрытых в лесных массивах, обнаружение заглубленных и малоразмерных морских объектов.
Основным назначением РСА является детальная съемка земной поверхности.

|
|
| Рис. 1. Режимы съемки современных РСА (а — детальный, б - обзорный, в - сканирующий) | Рис. 2. Примеры реальных радиолокационных изображений с разрешениями 0,3 м (вверху) и 0,1 м (внизу) |
|
|
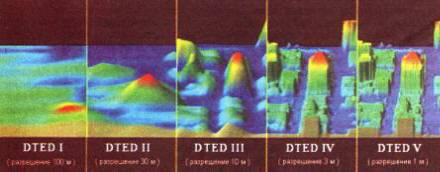
| Рис. 3. Вид изображений при разных уровнях детализации | |
|

|
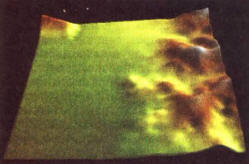
| Рис. 4. Примеры фрагментов реальных участков земной поверхности, полученных при уровнях детализации DTED2 (слева) и DTED4 (справа) | |
За счет искусственного увеличения апертуры бортовой антенны, основной принцип которого заключается в когерентном накоплении отраженных радиолокационных сигналов на интервале синтезирования, удается получить высокое разрешение по углу. В современных системах разрешение может достигать десятков сантиметров при работе в сантиметровом диапазоне длин волн. Аналогичные значения разрешения по дальности достигаются за счет применения внутриимпульсной модуляции, например, линейно-частотной модуляции (ЛЧМ). Интервал синтезирования апертуры антенны прямо пропорционален высоте полета носителя РСА, что обеспечивает независимость разрешения съемки от высоты.
В настоящее время существуют три основных режима съемки земной поверхности: обзорный, сканирующий и детальный (рис. 1). В обзорном режиме съемка земной поверхности осуществляется непрерывно в полосе захвата, при этом разделяют боковой и переднебоковой режим (в зависимости от ориентации главного лепестка диаграммы направленности антенны). Накопление сигнала осуществляется в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС. Сканирующий режим съемки отличается от обзорного тем, что съемка ведется на всей ширине полосы обзора, полосами равными ширине полосы захвата. Данный режим используется исключительно в РЛС космического базирования. При съемке в детальном режиме накопление сигнала осуществляется на увеличенном по сравнению с обзорным режимом интервале. Увеличение интервала осуществляется за счет синхронного с движением носителя РЛС перемещения главного лепестка диаграммы направленности антенны таким образом, чтобы облучаемый участок постоянно находился в зоне съемки. Современные системы позволяют получать снимки земной поверхности и расположенных на ней объектов с разрешениями порядка 1 м для обзорного и 0,3 м для детального режимов. Компания «Сандия» анонсировала создание РСА для тактических БЛА, имеющего возможность вести съемку с разрешением 0,1 м в детальном режиме. Существенное значение на результирующие характеристики РСА (в плане съемки земной поверхности) оказывают применяемые методы цифровой обработки принятого сигнала, важной составляющей которых являются адаптивные алгоритмы коррекции траекторных искажений. Именно невозможность выдерживать в течение длительного времени прямолинейную траекторию движения носителя не позволяет получать в непрерывном обзорном режиме съемки разрешения сопоставимые с детальным режимом, хотя никаких физических ограничений на разрешение в обзорном режиме не существует.
Режим инверсного синтезирования апертуры (ИРСА) позволяет осуществлять синтезирование апертуры антенны не за счет движения носителя, а за счет движения облучаемой цели. При этом речь может идти не о поступательном движении, характерном для наземных объектов, а о маятниковом движении (в разных плоскостях), характерном для плавучих средств, раскачивающихся на волнах. Данная возможность определяет основное назначение ИРСА - обнаружение и идентификация морских объектов. Характеристики современных ИРСА позволяют уверенно обнаруживать даже малоразмерные объекты, такие как перископы подводных лодок. Вести съемку в данном режиме имеют возможность все самолеты, состоящие на вооружении ВС США и других государств, в задачи которых входит патрулирование береговой зоны и акваторий. Получаемые в результате съемки изображения по своим характеристикам аналогичны изображениям, получаемым в результате съемки с прямым (неинверсным) синтезированием апертуры.
Режим интерферометрической съемки (Interferometric SAR - IFSAR) позволяет получать трехмерные изображения земной поверхности. При этом современные системы имеют возможность вести одноточечную съемку (то есть использовать одну антенну) для получения трехмерных изображений. Для характеристики данных изображений помимо обычного разрешения вводится дополнительный параметр, называемый точность определения высоты, или разрешение по высоте. В зависимости от значения данного параметра определяют несколько стандартных градаций трехмерных изображений (DTED - Digital Terrain Elevation Data):
DTEDO.............................. 900 м
DTED1.............................. 90m
DTED2............................ 30m
DTED3.............................. 10m
DTED4............................ Зм
DTED5.............................. 1m
Вид изображений урбанизированной территории (модель), соответствующий различным уровням детализации, представлен на рис. 3.
Уровни 3-5 получили официальное название «данных с высоким разрешением» (HRTe-High Resolution Terrain Elevation data). Определение местоположения наземных объектов на изображениях уровня 0-2 ведется в системе координат WGS 84, отсчет высоты осуществляется относительно нулевой отметки. Система координат изображений с высоким разрешением в настоящий момент не стандартизирована и находится на стадии обсуждения. На рис. 4 представлены фрагменты реальных участков земной поверхности, полученные в результате стереосъемки с различным разрешением.
В 2000 году американский МТКК «Шаттл» в рамках проекта SRTM (Shuttle Radar Topography Mission), целью которого являлось получение картографической информации крупных масштабов, выполнил интерферометрическую съемку экваториальной части Земли в полосе от 60° с. ш. до 56° ю. ш., получив на выходе трехмерную модель земной поверхности в формате DTED2. Для получения детальных трехмерных данных в США разрабатывается проект NGA HRTe? в рамках которого будут доступны изображения уровней 3-5.
Помимо радиолокационной съемки открытых участков земной поверхности, бортовая РЛС имеет возможность получать изображения сцен, скрытых от глаз наблюдателя. В частности, она позволяет обнаруживать объекты, скрытые в лесных массивах, а также, находящиеся под землей.
Проникающая РЛС (GPR, Ground Penetrating Radar) - система дистанционного зондирования, принцип действия которой основан на обработке сигналов, отраженных от деформированных или отличающихся по своему составу участков, находящихся в однородном (или относительно однородном) объеме. Система зондирования земной поверхности позволяет обнаруживать находящиеся на различной глубине пустоты, трещины, заглубленные объекты, выявлять участки различной плотности. При этом энергия отраженного сигнала сильно зависит от поглощающих свойств почвы, размеров и формы цели, степени неоднородности граничных областей. В настоящее время GPR помимо военно-прикладной направленности развился в коммерчески выгодную технологию.
Зондирование земной поверхности происходит путем облучения импульсами с частотой 10 МГц - 1,5 ГГц. Облучающая антенна может находиться на земной поверхности или расположена на борту летательного аппарата. Часть энергии облучения отражается от изменений в подповерхностной структуре земли, большая же часть проникает дальше в глубину. Отраженный сигнал принимается, обрабатывается, и результаты обработки отображаются на дисплее. При движении антенны генерируется непрерывное изображение, отражающее состояние подповерхностных слоев почвы. Так как фактически отражение происходит из-за различия ди-электрических проницаемо-стей различных веществ (или разных состояний одного вещества), то зондированием можно выявлять большое количество естественных и искусственных дефектов в однородной массе подповерхностных слоев. Глубина проникновения зависит от состояния почвы на месте облучения. Уменьшение амплитуды сигнала (поглощение или рассеяние) в значительной мере зависит от ряда свойств почвы, основное из которых - ее электропроводность. Так, оптимальными для зондирования являются песчаные почвы. Гораздо менее пригодны для этого глинистые и очень влажные почвы. Хорошие результаты показывает зондирование сухих материалов, таких как гранит, известняк, бетон.
Разрешениепризондированииможетбыть улучшено за счет повышения частоты излучаемых волн. Однако увеличение частоты отрицательно сказывается на глубине проникновения излучения. Так, сигналы с частотой 500-900 МГц могут проникать на глубину 1-3 м и обеспечивают разрешение до 10 см, а с частотой 80-300 МГц проникают на глубину 9-25 м, но разрешение составляет порядка 1,5 м.
Основным военным назначением РЛС подповерхностного зондирования является обнаружение заложенных мин. При этом РЛС, установленная на борту летательного аппарата, например вертолета, позволяет непосредственно вскрывать карты минных полей. На рис. 5 представлены изображения, полученные с помощью РЛС, установленной на борту вертолета, отражающие расположение противопехотных мин.
Бортовая РЛС, предназначенная для обнаружения и слежения за объектами, скрытыми в лесных массивах (FO-PEN - FOliage PENetrating), позволяет обнаруживать малоразмерные объекты (движущиеся и стационарные), скрытые кронами деревьев. Съемка объектов, скрытых в лесных массивах, ведется аналогично обычной съемке в двух режимах: обзорном и детальном. В среднем в обзорном режиме ширина полосы захвата составляет 2 км, что позволяет получать на выходе изображения участков земной поверхности 2x7 км; в детальном режиме съемка осуществляется участками 3х3 км. Разрешение съемки зависит от частоты и варьируется от 10 м при частоте 20-50 МГц до 1 м при частоте 200-500 МГц.
Современные методы анализа изображений позволяют с достаточно высокой вероятностью обнаруживать и производить последующую идентификацию объектов на полученном радиолокационном изображении. При этом обнаружение возможно на снимках как с высоким (менее 1 м), так и с низким (до 10 м) разрешением, в то время как для распознавания требуются изображения с достаточно высоким (порядка 0,5 м) разрешением. И даже в этом случае можно говорить в большей части только о распознавании по косвенным признакам, поскольку геометрическая форма объекта очень сильно искажена из-за наличия сигнала, отраженного от лиственного покрова, а также вследствие появления сигналов со смещением частоты за счет доплеровского эффекта, возникающего в результате колебания листвы на ветру.
На рис. 6 представлены изо-бражения (оптическое и радиолокационное) одного и того же участка местности. Объекты (колонна машин), невидимые на оптическом изображении, хорошо видны на радиолокационном, однако осуществить идентификацию данных объектов, абстрагировавшись от внешних признаков (движение по дороге, расстояние между машинами и т. д.), невозможно, так как при данном разрешении информация о геометрической структуре объекта отсутствует полностью.
Детальность получаемых радиолокационных изображений позволила реализовать на практике еще ряд особенностей, которые, в свою очередь, сделали возможным решение ряда важных практических задач. К одной из таких задач относится отслеживание изменений, произошедших на некотором участке земной поверхности за определенный период времени - когерентное детектирование. Длительность периода обычно определяется периодичностью патрулирования заданного района. Отслеживание изменений осуществляется на основе анализа покоординатно совмещенных изображений заданного района, полученных последовательно друг за другом. При этом возможны два уровня детализации анализа.

|

|
| Рис 5. Карты минных полей в трехмерном представлении при съемке в различных поляризациях: модель (справа), пример изображения реального участка земной поверхности со сложной подповерхностной обстановкой (слева), полученного с помощью РЛС, установленной на борту вертолета | |

|
|
| Рис. 6. Оптическое (вверху) и радиолокационное (внизу) изображения участка местности с движущейся по лесной дороге колонной автомобилей | |

|
|
Первый уровень предполагает обнаружение значительных изменений и основывается на анализе амплитудных отсчетов изображения, несущих основную визуальную информацию. Чаще всего в эту группу относятся изменения, которые сможет увидеть человек, просматривая одновременно два сформированных радиолокационных изображения. Второй уровень базируется на анализе фазовых отсчетов и позволяет выявлять изменения, невидимые человеческому глазу. К таковым можно отнести появление следов (машины или человека) на дороге, изменение состояния окон, дверей («открыто - закрыто») и т. д.
Другой интересной возможностью РСА, также анонсированной компанией «Сандия», является радиолокационная видеосъемка. В данном режиме дискретное формирование апертуры антенны от участка к участку, характерное для непрерывного обзорного режима, заменено на параллельное многоканальное формирование. То есть в каждый момент времени синтезируется не одна, а несколько (количество зависит от решаемых задач) апертур. Своего рода аналогом количества формируемых апертур является частота кадров в обычной видеосъемке. Данная возможность позволяет реализовывать селекцию движущихся целей на базе анализа полученных радиолокационных изображений, применяя принципы когерентного детектирования, что является по своей сути альтернативой стандартным РЛС, осуществляющим селекцию движущихся целей на основе анализа до-плеровских частот в принятом сигнале. Эффективность реализации подобных селекторов движущихся целей весьма сомнительна ввиду значительных аппаратно-программных затрат, поэтому подобные режимы с большой вероятностью так и останутся не более чем изящным способом решения задачи селекции, несмотря на открывающиеся возможности селектировать цели, движущиеся с очень низкими скоростями (менее 3 км/ч, что недоступно доплеровским СДЦ). Непосредственно видеосъемка в радиолокационном диапазоне в настоящее время также не нашла применения, опять же из-за высоких требований к быстродействию, поэтому действующих образцов военной техники, реализующих на практике данный режим, нет.
Логическим продолжением совершенствования техники съемки земной поверхности в радиолокационном диапазоне является развитие подсистем анализа полученной информации. В частности, важное значение приобретает разработка систем автоматического анализа радиолокационных изображений, позволяющих обнаруживать выделять и распознавать наземные объекты, попавшие в зону съемки. Сложность создания подобных систем связана с когерентной природой радиолокационных изображений, явления интерференции и дифракции в которых приводят к появлению артефактов - искусственных бликов, аналогичных тем, которые появляются при облучении цели с большой эффективной поверхностью рассеяния. Кроме того, качество радиолокационного изображения несколько ниже, чем качество аналогичного (по разрешению) оптического изображения. Все это приводит к тому, что эффективных реализаций алгоритмов распознавания объектов на радиолокационных изображениях в настоящее время не существует, но количество работ, проводимых в данной области, определенные успехи, достигнутые в последнее время, позволяют предположить, что в недалеком будущем можно будет вести речь об интеллектуальных беспилотных разведывательных аппаратах, имеющих возможность производить оценку наземной обстановки по результатам анализа информации, полученной собственными бортовыми средствами радиолокационной разведки.
Другим направлением развития является комплексирование, то есть согласованное объединение с последующей совместной обработкой, информации от нескольких источников. Это могут быть РЛС, ведущие съемку в различных режимах, либо РЛС и другие средства разведки (оптические, ИК, многоспектральные и т. п.).
Таким образом, современные РЛС с синтезированием апертуры антенны позволяют решать широкий спектр задач, связанных с ведением радиолокационной съемки земной поверхности независимо от времени суток и погодных условий, что делает их важным средством добывания информации о состоянии земной поверхности и находящихся на ней объектах.
Зарубежное военное обозрение №2 2009 С.52-56
Современная война стремительна и быстротечна. Зачастую победителем в боевом столкновении выходит тот, кто первым сумеет обнаружить потенциальную угрозу и адекватно на нее среагировать. Уже более семидесяти лет для поиска противника на суше, море и в воздухе используется метод радиолокации, основанный на излучении радиоволн и регистрации их отражений от различных объектов. Устройства, посылающие и принимающие подобные сигналы, называются радиолокационными станциями (РЛС) или радарами.
Термин «радар» - это английская аббревиатура (radio detection and ranging), которая была запущена в оборот в 1941 году, но давно уже стала самостоятельным словом и вошла в большинство языков мира.
Изобретение радара – это, безусловно, знаковое событие. Современный мир трудно представить без радиолокационных станций. Их используют в авиации, в морских перевозках, с помощью РЛС предсказывается погода, выявляются нарушители правил дорожного движения, производится сканирование земной поверхности. Радиолокационные комплексы (РЛК) нашли свое применение в космической промышленности и в системах навигации.
Однако наиболее широкое применение радары нашли в военном деле. Следует сказать, что эта технология изначально создавалась для военных нужд и дошла до стадии практической реализации перед самым началом Второй мировой войны . Все крупнейшие страны-участницы этого конфликта активно (и не без результата) использовали радиолокационные станции для разведки и обнаружения судов и самолетов противника. Можно уверенно утверждать, что применение радаров решило исход нескольких знаковых сражений как в Европе, так и на Тихоокеанском театре боевых действий.
Сегодня РЛС используются для решения чрезвычайно широкого спектра военных задач, от отслеживания запуска межконтинентальных баллистических ракет до артиллерийской разведки. Каждый самолет, вертолет, военный корабль имеет собственный радиолокационный комплекс. Радары являются основой системы противовоздушной обороны. Новейший радиолокационный комплекс с фазированной антенной решеткой будет установлен на перспективный российский танк «Армата». Вообще же, многообразие современных радаров поражает. Это абсолютно разные устройства, которые отличаются размерами, характеристиками и назначением.
С уверенностью можно заявить, что сегодня Россия является одним из признанных мировых лидеров в области разработки и производства РЛС. Однако прежде чем говорить о тенденциях развития радиолокационных комплексов, следует сказать несколько слов о принципах работы радаров, а также об истории радиолокационных систем.
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.
В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
- импульсные;
- непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
Антенна импульсного радара работает и на прием, и на передачу. После испускания сигнала передатчик отключается на время и включается приёмник. После его приема происходит обратный процесс.
Импульсные РЛС имеют как недостатки, так и преимущества. Они могут определять дальность сразу нескольких целей, подобный радар вполне может обходиться одной антенной, индикаторы подобных устройств отличаются простотой. Однако при этом сигнал, испускаемый подобным РЛС должен иметь довольно большую мощность. Также можно добавить, что все современные радары сопровождения выполнены по импульсной схеме.
В импульсных радиолокационных станциях в качестве источника сигнала обычно используют магнетроны, или лампы бегущей волны.
Антенна РЛС фокусирует электромагнитный сигнал и направляет его, улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, причем они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно, РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.
Типичным доплеровским радиолокатором является радар, который используют сотрудники дорожной полиции для определения скорости автомобилей.
Основной проблемой радаров непрерывного действия является невозможность с их помощью определять расстояние до объекта, зато при их работе не возникает помех от неподвижных предметов между РЛС и целью или за ней. Кроме того, доплеровские радары – это довольно простые устройства, которым для работы достаточно сигналов малой мощности. Также нужно отметить, что современные радиолокационные станции с непрерывным излучением имеют возможность определять расстояние до объекта. Для этого используется изменение частоты РЛС во время работы.
Одной из главных проблем в работе импульсных РЛС являются помехи, которые идут от неподвижных объектов — как правило, это земная поверхность, горы, холмы. При работе бортовых импульсных радаров самолетов все объекты, находящиеся ниже, «затеняются» сигналом, отраженным от земной поверхности. Если говорить о наземных или судовых радиолокационных комплексах, то для них эта проблема проявляется в обнаружении целей, летящих на малых высотах. Чтобы устранить подобные помехи используется все тот же эффект Доплера.
Кроме первичных РЛС, существуют и так называемые вторичные радиолокаторы, которые используются в авиации для опознания воздушных судов. В состав таких радиолокационных комплексов, кроме передатчика, антенны и приемного устройства, входит еще и самолетный ответчик. При облучении его электромагнитным сигналом ответчик выдает дополнительную информацию о высоте, маршруте, номере борта, его государственной принадлежности.
Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9-6 м (частота 50-330 МГц) и 0,3-1 м (частота 300-1000 МГц). Для управления воздушным движением применяется РЛС с длиной волны 7,5-15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
История радиолокации
Идея радиолокации возникла практически сразу после открытия радиоволн. В 1905 году сотрудник немецкой компании Siemens Кристиан Хюльсмейер создал устройство, которое с помощью радиоволн могло обнаружить крупные металлические объекты. Изобретатель предлагал устанавливать его на кораблях, чтобы они могли избегать столкновений в условиях плохой видимости. Однако судовые компании не заинтересовались новым прибором.
Проводились эксперименты с радиолокацией и в России. Еще в конце XIX века русский ученый Попов обнаружил, что металлические объекты препятствуют распространению радиоволн.
В начале 20-х годов американские инженеры Альберт Тейлор и Лeo Янг сумели с помощью радиоволн засечь проплывающее судно. Однако состояние радиотехнической промышленности того времени было таково, что создать промышленные образцы радиолокационных станций было затруднительно.
Первые радиолокационные станции, которые можно было использовать для решения практических задач, появились в Англии примерно в середине 30-х годов. Эти устройства были очень большими, устанавливать их можно было только на суше или на палубе больших кораблей. Только в 1937 году был создан прототип миниатюрной РЛС, которую можно было установить на самолет. К началу Второй мировой войны англичане имели развернутую цепь радиолокационных станций под названием Chain Home.
Занимались новым перспективным направлением и в Германии. Причем, нужно сказать, небезуспешно. Уже в 1935 году главнокомандующему германского флота Редеру был продемонстрирован действующий радиолокатор с электронно-лучевым дисплеем. Позже на его основе были созданы серийные образцы РЛС: Seetakt для военно-морских сил и Freya для ПВО. В 1940 году в немецкую армию стала поступать система радиолокационная управления огнем Würzburg.
Однако несмотря на очевидные достижения германских ученых и инженеров в области радиолокации, немецкая армия начала использовать радиолокаторы позже англичан. Гитлер и верхушка Рейха считали радары исключительно оборонительным оружием, которое не слишком нужно победоносной немецкой армии. Именно по этой причине к началу битвы за Британию у немцев было развернуто только восемь радиолокационных станции Freya, хотя по своим характеристикам они как минимум не уступали английским аналогам. В целом же можно сказать, что именно успешное использование радаров во многом определило исход битвы за Британию и последующее противостояние между Люфтваффе и ВВС союзников в небе Европы.
Позже немцы на основе системы Würzburg создали рубеж ПВО, который получил название «линии Каммхубера». Используя подразделения специального назначения, союзники сумели разгадать секреты работы немецких радаров, что позволило эффективно глушить их.
Несмотря на то, что англичане вступили в «радарную» гонку позже американцев и немцев, на финише они сумели обогнать их и подойти к началу Второй мировой войны с самой продвинутой системой радиолокационного обнаружения самолетов.
Уже в сентябре 1935 года англичане приступили к постройке сети радиолокационных станций, в состав которой перед войной уже входили двадцать РЛС. Она полностью перекрывала подлет к Британским островам со стороны европейского побережья. Летом 1940 года британскими инженерами был создан резонансный магнетрон, позже ставший основой бортовых радиолокационных станций, устанавливаемых на американских и британских самолетах.
Работы в области военной радиолокации велись и в Советском Союзе. Первые успешные эксперименты по обнаружению самолетов с помощью радиолокационных станций в СССР были проведены еще в середине 30-х годов. В 1939 году на вооружение РККА была принята первая РЛС РУС-1, а в 1940 году – РУС-2. Обе эти станции были запущены в серийное производство.
Вторая мировая война наглядно показала высокую эффективность использования радиолокационных станций. Поэтому после ее окончания разработка новых РЛС стала одним из приоритетных направлений развития военной техники. Бортовые радиолокаторы со временем получили все без исключения военные самолеты и корабли, РЛС стали основой для систем противовоздушной обороны.
В период Холодной войны у США и СССР появилось новое разрушительное оружие – межконтинентальные баллистические ракеты. Обнаружение запуска этих ракет стало вопросом жизни и смерти. Советский ученый Николай Кабанов предложил идею использования коротких радиоволн для обнаружения самолетов противника на больших расстояниях (до 3 тыс. км). Она была довольно проста: Кабанов выяснил, что радиоволны длиной 10-100 метров способны отражаться от ионосферы, и облучая цели на поверхности земли, возвращаться тем же путем к РЛС.
Позже на основе этой идеи были разработаны радиолокаторы загоризонтного обнаружения запуска баллистических ракет. Примером таких РЛС может служить «Дарьял» - радиолокационная станция, которая несколько десятилетий была основой советской системы предупреждения о ракетных пусках.
В настоящее время одним из самых перспективных направлений развития радиолокационной техники считается создание РЛС с фазированной антенной решеткой (ФАР). Подобные радары имеют не один, а сотни излучателей радиоволн, работой которых руководит мощный компьютер. Радиоволны, испускаемые разными источниками в ФАР, могут усиливать друг друга, если они совпадают по фазе, или же, наоборот, ослаблять.
Сигналу РЛС с фазированной решеткой можно придавать любую необходимую форму, его можно перемещать в пространстве без изменения положения самой антенны, работать с разными частотами излучения. РЛС с фазированной решеткой гораздо надежней и чувствительней, чем радиолокатор с обычной антенной. Однако у подобных радаров есть и недостатки: большой проблемой является охлаждение РЛС с ФАР, кроме того, они сложны в производстве и дорого стоят.
Новые радиолокационные станции с фазированной решеткой устанавливаются на истребители пятого поколения. Эта технология используется в американской системе раннего предупреждения о ракетном нападении. Радиолокационный комплекс с ФАР будет установлен на новейший российский танк «Армата». Следует отметить, что Россия является одним из мировых лидеров в разработке радиолокаторов с ФАР.
Если у вас возникли вопросы - оставляйте их в комментариях под статьей. Мы или наши посетители с радостью ответим на них
В репортаже военных новостей вьетнамского телеканала QPVN впервые продемонстрирована трехкоординатная РЛС дежурного режима обнаружения и сопровождения воздушных объектов метрового диапазона 55Ж6У Небо-УЭ разработки Нижегородского научно-исследовательского института радиотехники (Россия). Ранее о поставках данных РЛС во Вьетнам не сообщалось.
Видео с youtube.com/ https://www.youtube.com/embed/u47XQqILh_I
Одна из систем защиты начала работать в Заполярье. Станция слежения, которая видит из космоса даже футбольный мяч. В феврале 2019 г. в республике Коми введена в строй суперсовременная радиолокационная установка семейства «Воронеж». Она может очень точно определять параметры летящих целей. Станцию еще никто не видел, кроме создателей и сотрудников. Съемочная группа Первого канала стала первой, кому показали уникальное сооружение, которое выглядит скорее как футуристический арт-объект, а не грозная система сдерживания и предупреждения ядерного удара.

Радиолокационная станция «Небо-У» заступила на дежурство под Саратовом. Она позволила ужесточить контроль воздушного пространства в зоне ответственности местных зенитно-ракетных частей и увеличить радиус обнаружения целей. Сообщила 28 марта пресс-служба Центрального военного округа.
С помощью этой РЛС военные теперь могут оперативно засекать, снимать координаты и сопровождать цели в небе на высоте до 80 километров и дальности до 600 км. Цель, которую они могут сопровождать, может двигаться со скоростью до 8 Махов. Станция в состоянии сопровождать до 200 целей — от самолётов и беспилотников до крылатых и управляемых ракет. Она даже позволяет дистанционно определять их государственную принадлежность и осуществлять пеленгацию постановщиков активных помех.
РЛС «Небо-У» — самая совершенная станция в своём классе в мире.
В Арктике развернули мобильный радиолокационный комплекс (РЛК) «Резонанс-Н» с элементами искусственного интеллекта. Как пояснили «Известиям» в Минобороны, такие технологии важны для арктического региона, откуда потенциальный противник может ударить по Уралу, Сибири и Центральной России.

Минобороны России получило возможность контролировать воздушное пространство над Европой на большую глубину. В Ковылкинском районе Мордовии на опытно-боевое дежурство 1 декабря заступила радиолокационная станция (РЛС) загоризонтного обнаружения нового поколения типа «Контейнер», сообщает пресс-служба Минобороны РФ.
Радиолокационная станция загоризонтного обнаружения нового поколения типа «Контейнер» может обнаруживать массовый взлет гиперзвуковых крылатых ракет или авиации на расстоянии более двух тысяч километров от границ России, сообщил командующий 1-й армией ПВО-ПРО генерал-лейтенант Андрей Демин.
«Возможности этой станции позволяют наблюдать воздушные цели далеко за границей России, на расстоянии более двух тысяч километров. Эта станция позволит ВС России и высшему военно-политическому руководству, получая информацию об этих целях, вскрыть возможный замысел или попытку массового взлета крылатых ракет и полета в направлении к границе России, массового взлета авиации и в перспективе гиперзвуковых крылатых ракет, которые разрабатывает противник, в направлении России», — сказал Демин.

В воинскую часть радиотехнических войск объединения ВВС и ПВО Восточного военного округа на полуострове Камчатка поступила современная радиолокационная станция (РЛС) П-18Р.
РЛС предназначена для обнаружения воздушных объектов, измерения их дальности, азимута и радиальной скорости, автоматического сопровождения целей, автоматического распознавания их класса, а также передачи радиолокационной информации в интегрированную систему управления.
Достоинства поступившей на вооружение радиолокационной станции высокая дальность обнаружения и точность определения координат целей, эффективное обнаружение воздушных объектов, изготовленных по технологии Стелс, повышенная помехозащищённость и надёжность.
В ближайшее время оборудование будет введено в эксплуатацию.

Модернизированные радиолокационные станции (РЛС) «Гамма-С1М» и «Небо-УМ» заступили на боевое дежурство в соединении противовоздушной обороны Центрального военного округа (ЦВО) в Самарской области.
РЛС средних и больших высот поступили в ЦВО по гособоронзаказу-2018. Они предназначены для обнаружения, измерения координат и сопровождения на дальности до 600 км воздушных целей различных категорий — от самолетов до крылатых и управляемых ракет, в том числе малоразмерных, гиперзвуковых и баллистических.
Аппаратура станций позволяет определять государственную принадлежность объекта и передавать информацию на командный пункт или зенитным комплексам. Кроме того, имеется возможность пеленговать источники помех и определять их местоположение.
Расчеты радиолокационных станций и систем автоматизации соединения ПВО прошли курс обучения для работы с новыми образцами техники.

Соединения и воинские части Восточного военного округа продолжают получать современную и перспективную военную технику нового поколения.
За текущий месяц в соединения противовоздушной обороны ВВО поступило несколько единиц новейших радиолокационных станций, в частности, радиолокационных станций (РЛС) «Ниобий», «Каста».
Современные образцы радиолокационных станций «Ниобий» и «Каста» способны осуществлять контроль воздушного пространства, определять координаты и опознавать воздушные цели, выдавать параметры их движения на системы управления ПВО.
В ближайшее время в войска ПВО Восточного военного округа поступит еще одна новейшая станция -- подвижной радиовысотомер для определения высоты полета воздушных средств.

В рамках программы переоснащения войск Южного военного округа (ЮВО) в радиотехнический полк 4-й армии ВВС и ПВО ЮВО, дислоцированный в Волгоградской области, поступила новая радиолокационная станция (РЛС) «Каста-2».
РЛС «Каста-2» — это мобильная радиолокационная станция кругового обзора дежурного режима. Станция предназначена для контроля воздушного пространства, определения дальности, азимута, высоты полета и трассовых характеристик воздушных объектов — самолетов, вертолетов, дистанционно пилотируемых летательных аппаратов и крылатых ракет, в том числе летящих на малых и предельно малых высотах.

Размещенные в Крыму российские радиолокационные станции (РЛС) позволяют контролировать обстановку в воздушном пространстве над всем Черным морем. Высокоточные системы 55Ж6М «Небо-М» способны обнаруживать широкую номенклатуру сложных целей — от самолетов и вертолетов до крылатых ракет и гиперзвуковых аппаратов. Такие комплексы монтируются на машинах и могут быть оперативно развернуты в любой части полуострова. В Сирии 55Ж6М доказали свою высокую эффективность на авиабазе Хмеймим.

Для российских военных создана новая модификация радиолокационной станции «Подсолнух», которая сможет работать в условиях Арктики, сообщил в понедельник разработчик.
Мобильная трехкоординатная радиолокационная станция обнаружения воздушных целей 1Л122 охраняет сирийское небо. Информацию об этом обнародовали сирийские источники, разместив в качестве иллюстрации данную фотографию. На ней мы видим РЛС, смонтированную на гусеничном транспортере МТ-ЛБу. Технику на позиции охраняет сирийский военнослужащий. По соображениям секретности фон окружающей местности «замаскирован».


В Кировской области на боевое дежурство заступила новейшая РЛС «Гамма-С1», сообщает пресс-служба Центрального военного округа.
В сообщении ЦВО говорится, что РЛС «Гамма-С1» предназначена для контроля воздушного пространства с зоной обзора от десяти до 300 километров.
В расчет входят четыре человека, время развертывания — не более 40 минут.
Ранее сообщалось, что в подразделения радиотехнических войск Воздушно-космических сил поступило более 70 новейших радиолокационных станций, больших и малых, в 2017 году, в том числе «Небо-М», «Противник», «Всевысотный обнаружитель», «Сопка-2», «Подлет-К1» и «Подлет-М», «Каста-2-2», «Гамма-С1».

В подразделения радиотехнических войск Воздушно-космических сил поступило более 70 новейших радиолокационных станций в 2017 году. Среди них новейшие радиолокационные комплексы средних и больших высот «Небо-М», радиолокационные станции средних и больших высот «Противник», «Всевысотный обнаружитель», «Сопка-2», радиолокационные станции малых высот «Подлет-К1» и «Подлет-М», «Каста-2-2», «Гамма-С1», а также современные комплексы средств автоматизации «Фундамент» и другие средства.
РЛС предназначены для распознавания воздушных объектов, а также определения их параметров, таких как дальности, скорости, высоты и определения госпринадлежности.
Новые образцы вооружения радиотехнических войск, в отличие от средств радиолокации предыдущих поколений, созданы на современной элементной базе, с максимальной автоматизацией всех процессов и операций боевой работы и, следовательно, высокой боевой эффективностью в сочетании с простотой применения и технического обслуживания.
Все современные РЛС отличаются высокой помехоустойчивостью, способностью выполнять задачу по ведению радиолокационной разведки на любых позициях и повышенными возможностями по обнаружению различного класса целей.

Новая мобильная РЛС «Каста 2-2», способная обнаруживать стелс-объекты, заступила на боевой дежурство по контролю воздушного пространства в Поволжье. Станция усилила боевые возможности подразделений радиотехнических войск ЦВО, дислоцированных в Оренбургской области.
РЛС «Каста 2-2» — мобильная радиолокационная станция кругового обзора дежурного режима. Предназначена для контроля воздушного пространства, определения дальности, азимута, эшелона высоты полета и трассовых характеристик самолетов, вертолетов, крылатых ракет, в том числе летящих на малых и предельно малых высотах. Станция обнаруживает цели, выполненные с применением технологий «Стелс», а также движущиеся объекты на поверхности моря.

На боевое дежурство заступили три новые РЛС «Воронеж» в Красноярском и Алтайском краях и в Оренбургской области, сообщил в среду командующий Космическими войсками. Ранее он сообщал, что станции в этих регионах несут опытно-боевое дежурство.
«Да, впервые в истории Вооруженных Сил Российской Федерации на боевое дежурство по радиолокационному контролю в установленных зонах ответственности заступили сразу три новейшие радиолокационные станции „Воронеж“ системы предупреждения о ракетном нападении, созданные по технологии высокой заводской готовности в Красноярском, Алтайском краях и Оренбургской области», — сказал командующий.

Артиллеристы общевойсковой армии Западного военного округа, дислоцированные в Московской области, получили новейшие станции наземной артиллерийской разведки «Зоопарк».

В рамках гособоронзаказа два радиотехнических полка Западного военного округа (ЗВО), дислоцированных в Ленинградской области и Карелии, получили новейшие радиолокационные станции (РЛС) средних и больших высот дежурного режима «Небо-УМ».
"Небо-УМ" - дальнейшее развитие системы РЛС «Небо-У» с измененным составом оборудования, выполненным на новой элементной базе.
РЛС предназначена для наблюдения за воздушным пространством, обнаружения различных целей и определения их координат. Станция способна находить и сопровождать как аэродинамические (самолеты, вертолеты, крылатые ракеты и т. д.), так и баллистические (боевые блоки ракет) цели.
Аппаратура станции позволяет обнаруживать цель, определять ее координаты и государственную принадлежность и передавать информацию на командный пункт или зенитным комплексам. Кроме того, имеется возможность пеленговать источники помех и определять их местоположение.
Личный состав расчетов радиолокационных станций и систем автоматизации прошел плановое переучивание на новые образцы и техники и до конца года заступит на боевое дежурство по охране воздушных рубежей на Северо-Западе России.

На вооружении радиотехнического полка Западного военного округа (ЗВО), дислоцированного в Ленинградской области, поступила новая радиолокационная станция (РЛС) «Каста 2-2».
РЛС «Каста 2-2» — мобильная радиолокационная станция кругового обзора дежурного режима. Она предназначена для контроля воздушного пространства, определения дальности, азимута, эшелона высоты полета и трассовых характеристик воздушных объектов — самолетов, вертолетов, дистанционно пилотируемых летательных аппаратов и крылатых ракет, в том числе летящих на малых и предельно малых высотах. Станция обнаруживает цели, выполненные с применением технологий «Стелс», а также движущиеся объекты на поверхности моря.
«Каста 2-2» обладает высокой надежностью, удобством и безопасностью в эксплуатации, простотой технического обслуживания, по совокупности характеристик не имеет аналогов в мире.
Помимо непосредственно станций подразделения ЗВО оснащаются радиопрозрачными укрытиями, выносными рабочими местами оператора и средствами автоматизации.

Новые радиолокационные станции (РЛС) «Небо-У» и «Небо-М» поступили по Гособоронзаказу в 14 армию ВВС и ПВО Центрального военного округа.
Станции усилили подразделения радиотехнических войск округа, дислоцированных в Поволжье и Западной Сибири.
Работы возглавляет руководитель рабочей группы научно-технического совета Военно-промышленной комиссии по радиофотонике Алексей Николаевич Шулунов. Сделаны первые шаги, которые можно считать успешными. Похоже, в классической радиолокации открывается новая эра, которая сейчас кажется фантастикой.
Что такое радиолокация знают, наверное, все, кто окончил хотя бы среднюю школу. А что собой представляет радиофотонная локация, известно не очень большому кругу специалистов. Если упрощенно, то новая технология позволяет совместить несовместимое - радиоволну и свет. При этом поток электронов должен преобразовываться в поток фотонов и наоборот. Задача, которая вчера была за пределами реальности, уже в ближайшем будущем может быть решена. Что это даст?
Например, основу радиолокационных систем ПРО и слежения за космическими объектами составляют огромные радарные комплексы. Помещения, в которых находится аппаратура, - это многоэтажные здания. Применение фотонных технологий позволит уместить все системы управления и обработки данных в значительно меньших габаритах - буквально в нескольких комнатах. При этом технические возможности радаров по обнаружению даже малых объектов на удалении в тысячи километров только повысятся. Более того, за счет применения фотонных технологий на экране РЛС появится не отметка цели, а ее образ, что недостижимо классической радиолокацией. То есть оператор вместо привычной светящейся точки увидит, что реально летит - самолет, ракета, стая птиц или метеорит, стоит повторить, даже за тысячи километров от радара.
На экране фотонной РЛС появится не отметка цели, а ее образ, что недостижимо классической радиолокацией
Сейчас все радиолокационные системы - военные и гражданские - работают в строго определенном диапазоне частот, что усложняет техническое проектирование и ведет к многообразию номенклатуры РЛС. Фотонные радары позволят достичь высшей степени унификации. Они способны мгновенно перестраиваться в очень широком диапазоне рабочих частот - от метровых величин до миллиметровых.
Давно не секрет, что в метровом диапазоне хорошо видны и так называемые самолеты-невидимки, но вот наиболее точно их координаты лучше выдают станции сантиметрового и миллиметрового диапазонов. Поэтому в системах ПВО одновременно работают и метровые станции с очень большими антеннами, и более компактные - сантиметровые. А вот фотонный радар, сканируя пространство в длинном частотном диапазоне, без проблем засечет ту же "невидимку" и, мгновенно перестроившись на широкополосный сигнал и высокую частоту, определит ее точные координаты по высоте и дальности.
Это только то, что касается локации. Революционные изменения произойдут и в радиоэлектронной борьбе, в передаче информации и ее защите, в вычислительных технологиях и многом другом. Проще сказать, что не затронет радиофотоника.
По сути будет создана принципиально новая отрасль высокотехнологической промышленности. Задача сложнейшая, поэтому в ее решение вовлечены многие ведущие научно-исследовательские центры страны, вузовская наука, ряд промышленных предприятий. По словам Шулунова, работы идут в тесной связи с минобороны, минэкономразвития, министерством науки и образования. Недавно их взял под свой контроль президент России.

